□ Creo에서 움직이는 부품이 있는 조립 모델링 및 애니메이션
Creo는 움직이는 부품을 포함하는 조립 모델을 생성하고 애니메이션을 만드는 데 강력한 기능을 제공합니다. 이러한 기능을 사용하면 엔지니어는 설계를 시각화하고 성능을 분석하며 제조 공정을 계획할 수 있습니다.
조립 관계 설정
조립 모델의 주요 단계 중 하나는 부품 간의 관계를 정의하는 것입니다. 이는 조립 구속 조건을 사용하여 수행됩니다. 조립 구속 조건은 부품이 서로 어떻게 움직일 수 있는지 제한합니다. Creo에는 다양한 유형의 조립 구속 조건이 있으며 각 유형은 고유한 기능을 제공합니다.

조인트 연결
조립 모델에서 움직임을 정의하는 일반적인 방법 중 하나는 조인트 연결을 사용하는 것입니다. 조인트 연결은 특별히 패키지된 제약 세트이며 부품 간의 적절한 움직임을 허용하도록 설계되었습니다. 조인트 연결을 사용하면 다음을 수행할 수 있습니다.
- 회전 운동 (예: 휠 및 액슬)
- 선형 운동 (예: 슬라이더 및 크랭크)
- 더 복잡한 움직임 (예: 다축 조인트)

모션 분석
조립 모델을 만든 후에는 모션 분석을 수행하여 설계가 제대로 작동하는지 확인할 수 있습니다. Creo에는 다양한 모션 분석 도구가 있으며 다음을 수행하는 데 사용할 수 있습니다.
- 부품의 움직임 시뮬레이션
- 속도와 가속도 계산
- 토크 및 힘 분석
애니메이션
애니메이션은 설계의 움직임을 시각화하는 강력한 도구입니다. Creo에는 다양한 애니메이션 도구가 있으며 다음을 수행하는 데 사용할 수 있습니다.
- 현실적인 애니메이션 만들기
- 디자인 컨셉 시각화
- 제조 공정 계획
Creo에서 애니메이션을 만드는 두 가지 주요 방법:
- 키 프레임 애니메이션: 이 유형의 애니메이션에서는 특정 시간 간격으로 모델의 위치를 정의하는 키 프레임을 사용합니다. Creo는 키 프레임 사이의 위치를 자동으로 보간하여 부드러운 움직임을 만듭니다.
- 서보 모터 애니메이션: 이 유형의 애니메이션에서는 서보 모터를 사용하여 모델을 구동합니다. 서보 모터는 실제 엔진 및 기타 구동 장치를 시뮬레이션하는 데 사용할 수 있는 특수 유형의 조립 구속 조건입니다.
Creo를 사용한 움직이는 부품이 있는 조립 모델링 및 애니메이션의 장점:
- 설계를 시각화하고 이해하기 쉬워짐
- 성능 문제 식별 및 해결
- 제조 공정 계획
- 고객에게 디자인 소통
Creo는 움직이는 부품이 있는 조립 모델링 및 애니메이션을 위한 강력한 도구입니다. 이러한 기능을 사용하면 엔지니어는 더 나은 제품을 설계하고 제조 시간과 비용을 절감할 수 있습니다.
□ CREO에서 조인트 연결 사용 방법
조인트 연결은 CREO에서 움직이는 부품을 연결하는 데 사용되는 특수한 유형의 패키지 구속 조건입니다. 적용된 공동 연결은 선택된 부품 간의 상대적인 움직임을 제한합니다. 각각의 독립적인 구속 조건에 의해 허용되는 움직임을 자유도(DOF)라고 합니다.
조인트 연결의 자유도
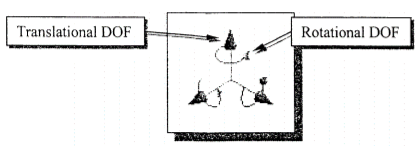
이 구속 조건이 허용하는 자유도는 아래 그림과 같이 세 개의 수직 축을 기준으로 변환 및 회전이 가능합니다.
- X 축: 좌우로 이동 가능
- Y 축: 앞뒤로 이동 가능
- Z 축: 위아래로 이동 가능
- 회전: X, Y, Z 축을 중심으로 회전 가능
조인트 연결 만들기
- 삽입 탭에서 구속 그룹을 선택합니다.
- 조인트 연결을 선택합니다.
- 연결할 부품 두 개를 선택합니다.
- 필요한 자유도를 선택합니다.
- 확인을 클릭합니다.
조인트 연결 유형
CREO에는 다양한 유형의 공동 연결이 제공됩니다. 각 유형은 허용되는 자유도가 다릅니다.
- 고정: 어떠한 움직임도 허용하지 않음
- 원통형: Z 축 방향으로 이동 및 X, Y 축을 중심으로 회전 가능
- 볼: X, Y, Z 축 방향으로 이동 및 X, Y, Z 축을 중심으로 회전 가능
- 플랜: X, Y 축 방향으로 이동 가능
- 슬라이딩: Z 축 방향으로 이동 가능
조인트 연결 사용 예시
공동 연결은 다양한 기계 설계에 사용될 수 있습니다. 예를 들어:
- 엔진의 크랭크 샤프트와 피스톤 연결
- 로봇 팔의 링크 연결
- 자동차 서스펜션 시스템의 부품 연결
조인트 연결 장점
- 부품 간의 움직임을 쉽게 제어할 수 있음
- 설계 프로세스를 간소화할 수 있음
- 정확하고 안정적인 조립품을 만들 수 있음
조인트 연결 단점
- 너무 많은 구속 조건을 사용하면 성능 저하가 발생할 수 있음
- 복잡한 조립품의 경우 설계가 어려울 수 있음
주의 사항
- 조인트 연결을 사용하기 전에 각 부품의 정확한 위치와 방향을 설정해야 합니다.
- 너무 많은 구속 조건을 사용하면 조립품이 움직이지 않을 수 있습니다.
- 복잡한 조립품의 경우 단계별로 구속 조건을 추가하는 것이 좋습니다.
어셈블리의 각 구성 요소에는 6개의 자유도(DOF)가 있습니다.
이는 3D 공간에서 강체가 움직일 수 있는 방식을 나타냅니다.
6개의 자유도는 다음과 같이 분류됩니다.
변환 자유도(3개):
X 축을 따라 앞뒤로 이동
Y 축을 따라 좌우로 이동
Z 축을 따라 위아래로 이동
회전 자유도(3개):
X 축을 중심으로 회전
Y 축을 중심으로 회전
Z 축을 중심으로 회전
예를 들어, 볼트와 너트를 생각해 보세요. 볼트는 너트 안에 삽입되어 회전할 수 있지만, 위아래로는
움직일 수 없습니다. 이 경우 볼트는 3개의 회전 자유도만 가지고 있습니다.
반면, 테이블 위에 놓인 공은 6개의 자유도를 모두 가지고 있습니다. 공은 X, Y, Z 축을 따라 자유롭게
이동할 수 있으며, 또한 X, Y, Z 축을 중심으로 회전할 수 있습니다.
어셈블리에서 구성 요소의 자유도는 연결 방식에 따라 제한될 수 있습니다. 예를 들어, 두 개의 구성 요소가
볼트와 너트처럼 삽입되면 회전 자유도만 허용되고 다른 변환 자유도는 제한됩니다.
구성 요소의 자유도를 이해하는 것은 기계 설계에서 매우 중요합니다. 자유도를 올바르게 제어하면 원하는
방식으로 작동하는 제품을 만들 수 있고, 부품 간의 간섭을 방지할 수 있으며, 조립 과정을 간소화할 수 있습니다.
□ CREO에서 사용 가능한 조인트 연결 유형 및 특징
CREO는 다양한 유형의 조인트 연결을 제공하여 움직이는 부품을 연결하고 어셈블리의 움직임을 제어하는 데 사용할 수 있습니다. 각 유형의 연결은 고유한 자유도(DOF)를 가지고 있으며, 이는 연결된 부품이 움직일 수 있는 방식을 결정합니다.
사용 가능한 조인트 연결 유형:
- Rigid: 어떠한 움직임도 허용하지 않습니다.
- Pin: 한 축을 따라 병진 운동만 허용합니다.
- Slider: 한 평면에서 병진 운동만 허용합니다.
- Silicon: 한 축을 따라 병진 운동과 한 축을 중심으로 회전을 허용합니다.
- Planar: 한 평면에서 병진 운동과 한 축을 중심으로 회전을 허용합니다.
- Ball: 모든 방향으로 회전을 허용합니다.
- Weld: 두 부품을 완전히 고정합니다.
- Bearing: 한 축을 따라 회전만 허용합니다.
- General: 사용자가 정의한 자유도를 허용합니다.
- 6DOF: 모든 방향으로 병진 운동과 회전을 허용합니다.
- Slot: 특수한 움직임을 허용하도록 사용자 정의할 수 있는 고급 조인트 유형입니다.
조인트 연결 생성:
조인트 연결은 일반적으로 다음과 같은 여러 어셈블리 배치 구속 조건을 적용하여 생성됩니다.
- 정렬: 두 부품의 특징(예: 축, 평면, 모서리)을 정렬합니다.
- 결합: 두 부품의 특징(예: 점, 선)을 일치시킵니다.
- 결합: 두 부품의 거리를 제한합니다.
일부 연결 유형의 경우 참조는 어셈블리의 동일한 두 부품에 있어야 합니다. 또한 움직이는 부품이 있는 어셈블리에서는 모든 움직임을 완전히 잠그는 대신(모든 DOF 제거) 특정 DOF는 지정된 이동을 허용하도록 유지됩니다.
예시:
- 원통 조인트: 두 기준축을 정렬하여 생성됩니다. 하나의 병진 DOF와 하나의 회전 DOF를 허용합니다.
- 핀 조인트: 두 축을 정렬하여 생성됩니다. 하나의 병진 DOF만 허용합니다.
- 슬라이더 조인트: 두 평면을 정렬하여 생성됩니다. 한 평면에서 병진 DOF만 허용합니다.
- 플랜 조인트: 두 평면을 정렬하고 두 축을 일치시켜 생성됩니다. 한 평면에서 병진 DOF와 한 축을 중심으로 회전을 허용합니다.
조인트 연결 기호:
CREO(조인트 연결 제약 조건을 적용하는 동안) 및 애니메이션에서도 유형을 식별하는 작은 기호가 생성된 조인트 연결 옆에 표시됩니다. 주어진 조인트의 기호는 또한 병진 및/또는 회전 DOF 조인트가 허용되는지 여부를 나타냅니다. 움직이는 구성 요소가 있는 조립의 경우 핀, 슬라이더, 플랫 및 실린더의 네 가지 기본 기호가 있습니다.
주의 사항:
- 모든 조인트 연결 유형이 모든 상황에 적합한 것은 아닙니다. 어셈블리에 적합한 조인트 유형을 선택하는 것이 중요합니다.
- 너무 많은 조인트 연결을 사용하면 어셈블리의 성능이 저하될 수 있습니다.
- 조인트 연결을 사용하기 전에 각 부품의 정확한 위치와 방향을 설정해야 합니다.
□ Four Basic Joint Connections
1. Pin
핀 연결 적용 방법
핀 연결은 움직이는 부품을 고정 부품에 연결하는 데 사용되는 일반적인 유형의 연결입니다.
이 유형의 연결을 적용하려면 다음 단계를 따르세요.
1) 움직이는 부품의 축 정렬:
먼저 움직이는 부품의 축(또는 회전된 표면)을 어셈블리에 정렬해야 합니다.
이렇게 하려면 정렬 기능을 사용하여 움직이는 부품의 축을 어셈블리의 참조 축 또는 평면에 정렬합니다.
참고로, 어셈블리의 참조는 핀 연결의 정의 탭에서 선택할 수 있습니다.
2) 움직이는 부품의 평면 정렬/메이트:
다음으로 움직이는 부품의 평평한 표면(또는 데이텀 평면)을 어셈블리에 정렬/메이트해야 합니다.
이렇게 하려면 정렬/메이트 기능을 사용하여 움직이는 부품의 평면을 어셈블리의 참조 평면에 정렬합니다.
중요한 것은 두 정렬/메이트 참조 모두 동일한 어셈블리 구성 요소를 참조해야 한다는 것입니다.
이는 핀 연결이 단 하나의 회전 동작만 허용하도록 하기 때문입니다.
3) 연결 완료:
위의 두 단계를 완료하면 핀 연결이 생성됩니다.
이 연결은 움직이는 부품이 정렬된 축을 따라 회전하도록 제한합니다.
4) 참고:
핀 연결은 삽입, 볼트 및 너트와 같은 다른 유형의 연결과 함께 사용할 수 있습니다.
핀 연결의 정의 탭에서 연결의 특성을 변경할 수 있습니다. 여기에는 오프셋, 허용되는 회전 각도 및
연결 유형(예: 강체, 유연)과 같은 설정이 포함됩니다.
2. Slider
축 정렬:
먼저 움직이는 구성 요소의 축(또는 모서리)을 어셈블리에 정렬해야 합니다.
이렇게 하려면 다음 단계를 따르세요.
1) 움직이는 구성 요소와 어셈블리를 선택합니다.
-조인트 > 정렬 > 축 을 선택합니다.
-움직이는 구성 요소의 축과 어셈블리의 참조 축을 선택합니다.
-선택한 축들이 서로 일치하도록 조정합니다.
-표면 정렬/메이트: 다음으로 움직이는 부품의 평평한 표면(또는 데이텀 평면)을 어셈블리에 정렬하고
메이트해야 합니다. 이렇게 하려면 다음 단계를 따르세요.
2) 움직이는 구성 요소와 어셈블리를 선택합니다.
-조인트 > 정렬 > 표면 을 선택합니다.
-움직이는 부품의 표면과 어셈블리의 참조 표면을 선택합니다.
선택한 표면들이 서로 일치하도록 조정합니다.
3)참고 세트: 두 정렬 작업 모두에서 참고 세트를 선택해야 합니다.
-참고 세트는 연결의 방향과 회전을 정의하는 데 사용됩니다.
-일반적으로 움직이는 구성 요소의 다른 표면이나 축을 참고 세트로 선택합니다.
주의 사항:
-두 참조 세트는 어셈블리의 동일한 구성 요소에 있어야 합니다.
-이 연결 유형은 정렬된 방향을 따라 한 번의 회전 동작과 두 가지 병진 동작을 허용합니다.
3. Cylinder
축 정렬 조인트는 움직이는 구성 요소의 축을 어셈블리의 참조 축에 정렬하는 데 사용되는 유형의 조인트입니다. 이 유형의 연결은 움직이는 구성 요소가 정렬된 축을 따라 회전하고 병진 이동하도록 허용하지만 다른 방향으로는 이동할 수 없습니다.
장점:
- 축 정렬 조인트는 간단하고 사용하기 쉽습니다.
- 회전 운동과 병진 운동을 모두 허용합니다.
- 움직이는 구성 요소의 정렬을 정확하게 제어할 수 있습니다.
단점:
- 축 정렬 조인트는 두 자유도만 제공합니다(하나의 회전 및 하나의 병진).
- 다른 유형의 조인트만큼 강하지 않을 수 있습니다.
- 복잡한 회전 운동을 모델링하기에는 적합하지 않을 수 있습니다.
1) 적용 사례:
- 축 정렬 조인트는 샤프트, 액슬 및 기타 회전 부품을 모델링하는 데 일반적으로 사용됩니다.
또한 림, 캠 및 기타 회전 및 병진 운동을 수행하는 부품을 모델링하는 데 사용할 수 있습니다.
2) 추가 구속 조건:
- 축 정렬 조인트에 추가 구속 조건을 적용하여 구성 요소의 동작을 더욱 제한할 수 있습니다.
예를 들어, 다음과 같은 추가 구속 조건을 추가할 수 있습니다.
- 고정 조인트: 움직이는 구성 요소를 특정 위치에 고정합니다.
- 힌지 조인트: 움직이는 구성 요소가 정렬된 축을 따라 회전만 허용합니다.
- 슬라이딩 조인트: 움직이는 구성 요소가 정렬된 축을 따라서만 병진 이동하도록 허용합니다.
3) 연결 사용 방법:
축 정렬 조인트를 사용하려면 다음 단계를 따르세요.
- 움직이는 구성 요소와 어셈블리를 선택합니다.
- 조인트 > 정렬 > 축을 선택합니다.
- 움직이는 구성 요소의 축과 어셈블리의 참조 축을 선택합니다.
- 선택한 축들이 서로 일치하도록 조정합니다.
- 필요한 경우 추가 구속 조건을 추가합니다.
- 조인트 검사기를 사용하여 연결이 정확하게 정렬되었는지 확인합니다.
4) 주의:
참조 축은 어셈블리에 있어야 합니다.
- 축 정렬 조인트는 하나의 회전 자유도와 하나의 병진 자유도만 제공합니다.
- 추가 구속 조건을 사용하여 구성 요소의 동작을 더욱 제한할 수 있습니다
4. Planar
평면 정렬/메이트 조인트는 움직이는 구성 요소의 평면(또는 데이텀 평면)을 어셈블리의 참조 평면에 정렬하고 메이트하는 데 사용되는 유형의 조인트입니다. 이 유형의 연결은 움직이는 구성 요소가 정렬된 평면에 수직으로 회전하고 두 방향으로 병진 이동하도록 허용하지만 다른 방향으로는 이동할 수 없습니다.
장점:
- 평면 정렬/메이트 조인트는 간단하고 사용하기 쉽습니다.
- 회전 운동과 두 방향의 병진 운동을 모두 허용합니다.
- 움직이는 구성 요소의 평면 정렬을 정확하게 제어할 수 있습니다.
단점:
- 평면 정렬/메이트 조인트는 세 개의 자유도만 제공합니다(하나의 회전 및 두 개의 병진).
- 다른 유형의 조인트만큼 강하지 않을 수 있습니다.
- 복잡한 회전 및 병진 운동을 모델링하기에는 적합하지 않을 수 있습니다.
1) 연결 사용 방법:
평면 정렬/메이트 조인트를 사용하려면 다음 단계를 따르세요.
- 움직이는 구성 요소와 어셈블리를 선택합니다.
- 조인트 > 정렬 > 표면을 선택합니다.
- 움직이는 구성 요소의 표면과 어셈블리의 참조 표면을 선택합니다.
- 선택한 표면들이 서로 일치하도록 조정합니다.
- 필요한 경우 추가 구속 조건을 추가합니다.
- 조인트 검사기를 사용하여 연결이 정확하게 정렬되었는지 확인합니다.
2) 주의 사항:
- 참조 표면은 어셈블리에 있어야 합니다.
- 평면 정렬/메이트 조인트는 하나의 회전 자유도와 두 개의 병진 자유도를 제공합니다.
- 추가 구속 조건을 사용하여 구성 요소의 동작을 더욱 제한할 수 있습니다.
□ Server Motor
애니메이션에서 서보 모터는 메커니즘 내 특정 동작을 생성하는 데 핵심적인 역할을 합니다. 서보 모터를 사용하면 원하는 위치, 속도 또는 가속도를 시간 함수로 정의하여 구성 요소를 정밀하게 제어할 수 있습니다. 이러한 제어는 병진 운동 또는 회전 운동 모두에 적용될 수 있습니다.
애니메이션에서 서보 모터는 다양한 메커니즘의 동작을 정밀하게 제어하고 현실적인 운동을 재현하는 데 필수적인 요소입니다. Pro/Animation은 서보 모터를 쉽게 표현하고 제어할 수 있도록 다양한 기능을 제공합니다.

Mechanism Connection
메커니즘의 기능을 통해 사용자는 메커니즘 성능을 시뮬레이션하고 시각화할 수 있습니다. 제품 개발 단계 초기에 메커니즘을 사용하면 물리적 테스트 단계에서 발견된 설계 결함으로 인해 비
tool-2020.tistory.com
'Creo Reference Room > Assembly' 카테고리의 다른 글
| Creo 8 : Inseparable Assemblies (0) | 2024.09.25 |
|---|---|
| Skeleton : 기준 구조 (1) | 2024.09.09 |
| Assembly Pakage? (0) | 2024.02.29 |
| IFX 사용 예) 마우스 포인트를 클릭하여 패스너 조립 (1) | 2024.02.11 |
| IFX 사용 예) 데이텀 포인트를 이용하여 패스너 조립 (0) | 2024.02.10 |



