■ Gear는 회전 방향 및 속도 변경을 할 수 있습니다.
1. 모든 기어 쌍에서 큰 기어는 작은 기어보다 느리게 움직입니다. 기어는 회전 방향을 변경하는 경향이 있습니다.

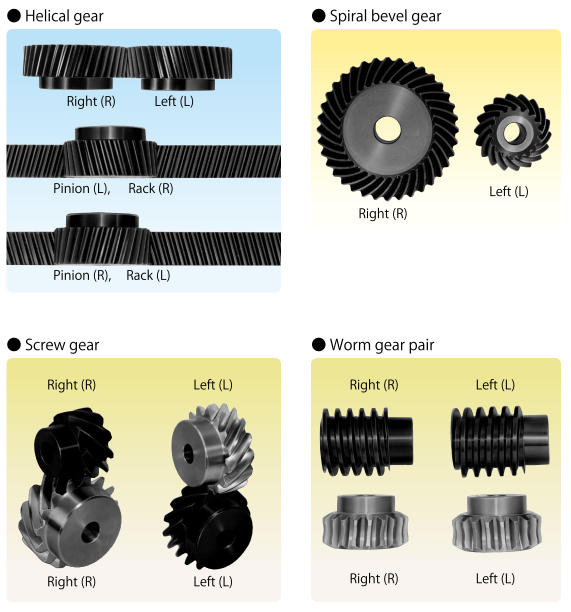
2. 직각(90˚)으로 교차하는 축 사이에 동력과 움직임을 전달합니다. 스트레이트 베벨 기어 또는 스파이럴 베벨 기어가 사용됩니다.

3. 일반적으로 직각(90˚)인 평행하지 않고 교차하지 않는 샤프트 사이에서 운동과 동력을 전달합니다. 나사 기어와 웜 기어 쌍이 사용됩니다.

■ Gear에 대한 기술 용어
1. 기어 톱니의 비교 크기
m1, m3, m8,・・・ 여기서 " m "은 "모듈"을 나타내며 사용되는 단위는 미터법입니다. 이 m l, m 3, m 8을 각각 모듈 1, 모듈 3, 모듈 8이라고 합니다. 톱니의 크기를 나타내는 글로벌 용어입니다. 숫자가 클수록 치아 크기가 커집니다.

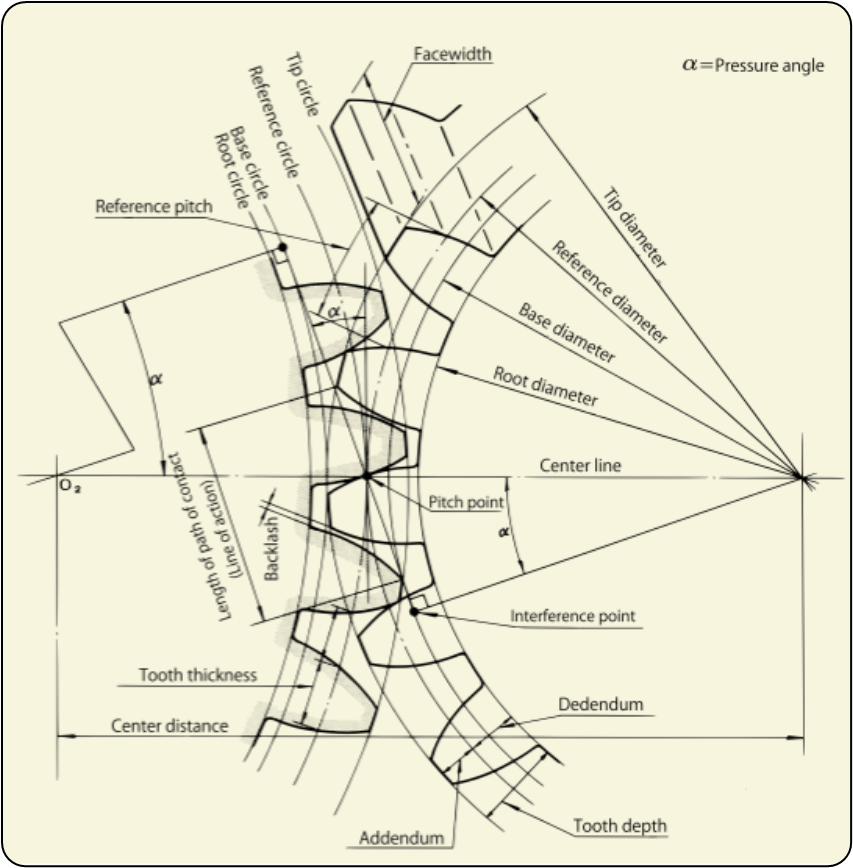
2. 치아 프로파일 및 압력 각도
인벌류트 기어 톱니와 사이클로이드 기어 톱니는 톱니 프로파일의 전형입니다. 현대식 기어링은 인벌류트 톱니를 기반으로 합니다. 만족스러운 기어는 롤링 작용을 통해 동력과 움직임을 원활하게 전달해야 합니다. 인벌류트 기어 형태는 짝을 이루는 기어 톱니 사이에 일정한 속도 비율을 제공합니다.
1) 인벌류트 치아의 특징
・한 짝으로 결합한 중심 거리의 작은 오차에 상대적으로 독립적입니다.
・치아 프로파일이 비교적 간단하여 저비용으로 제작할 수 있습니다.
・접점을 부드럽게 움직여 모션을 전달합니다.
・톱니 한 개로 톱니의 크기(모듈)가 같으면 톱니 개수가 다른 기어를 가공할 수 있어 호브 교체에 드는 시간과 노동력을 절약할 수 있습니다.
・치아는 뿌리가 굵기 때문에 강하다.
2) 압력각은 보통 20˚입니다. 그러나 경우에 따라 14.5˚, 15˚ 또는 17.5˚, 22.5˚ 또는 27˚. 입니다.
3. 손의 방향과 짝짓기
▶ 기어 관련 용어 모음 사이트
Gear | Wikiwand
A gear is a rotating circular machine part having cut teeth or, in the case of a cogwheel or gearwheel, inserted teeth , which mesh with another toothed part to transmit torque and speed. The basic principle behind the operation of gears is analogous to th
www.wikiwand.com
4. Spur Gear Parameter 컨셉
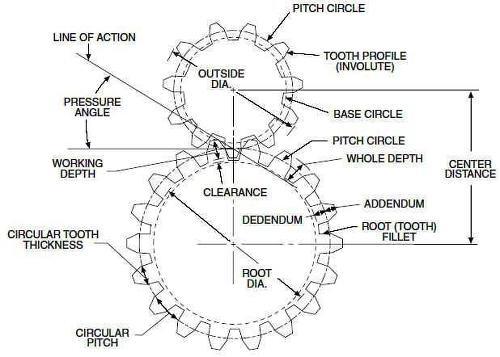
1. Pitch_Circle= Module * Num_Teeth
2. Base_Circle = Pitch_Circle* cos (Pressure_Angle)
3. Outside_Dia= Pitch_Circle + 2.0 * Module
4. Root_Dia = Pitch_Circle- 2.5 * Module
5. Circular_Tooth_Thickness=πm/2
6. Involute 커브 Parameter
r = Base_Circle/2
ang = t * 90
s = (PI * r * t ) / 2
xc = r * cos(ang)
yc = r * sin(ang)
x = xc + ( s * sin(ang))
y = yc - ( s * cos(ang))
z = 0
참고 : Involute Curve Generation with Pro/Engineer (Creo)
Involute Curve Generation with Pro/Engineer (Creo)
Involute curves got wide range of Mechanical Engineering applications like Involute Gear Teeth, Centrifugal casing design, etc. Let us see how to create an involute curves in Pro/Engineer (Creo). Equation of Involute curve (Parametric, Cartesian Coordinate
www.meadinfo.org

왼쪽이 오른쪽을 구동하는 두 개의 인벌류트 기어: 파란색 화살표는 두 기어 사이의 접촉력을 보여줍니다. 힘선(또는 작용선 )은 두 기본 원에 공통된 접선인 파란색 파선의 긴 다리를 따라 이어집니다. 여기서 인벌류트는 반대 방식으로 추적됩니다. 접촉점 은 마치 왼쪽 회전 기본 원 에서 풀리는 것처럼 고정된 힘-벡터 "끈"을 따라 이동하고 오른쪽 회전 에 감습니다.기본 원. 이 상황에서는 반대 [왼쪽 아래에서 오른쪽 위] 공통 접선(표시되지 않음)을 따라 힘이 없으므로 접촉이 필요하지 않습니다. 다시 말해서 톱니가 약간 더 좁고 다른 모든 것은 동일하게 유지된다면 왼쪽 기어의 각 톱니 위에 간격이 있을 것입니다. 왜냐하면 아래쪽으로 힘이 가해지기 때문입니다.
PTC > Involute Gears Modeling
5. 전위 SPUR GEAR 의미
전위 계수을 입력 하여 기어 이두께를 변경 합니다. 기어 이의 변형을 감소 시킵니다.
전위기어(Profile Shifted Gear)
전위기어란?전위 기어란 표준 보통이기어의 치형 곡선을 비켜놓아 이끝원과 이뿌리원을 크거나 작게 만든 ...
blog.naver.com
전위계수의 차이와 전위기어(compensation gear)의 백래시(backlash)
위 그림은 모듈 2mm 치형을 0.5mm 단위로 전위를 하여 그린 기어들을 한곳에 겹친 그림입니다. (위 그림은 전위거리 값이며 전위계수에 모듈 값을 곱하면 전위거리가 됩니다.) 전위 값이 클수록 치
tro.kr
전위 계수 매개변수 : AMOUNT_ADD_MODI
전위 계수 선정 : ☞ 이곳을 클릭 하세요
6. Supr Gear Parameter
Pitch_Circle= Module * Num_Teeth
Base_Circle = Pitch_Circle * cos (Pressure_Angle)
IF profile_shifted_gear == NO
Outer_Dia= Pitch_Circle + 2 * Module
Root_Dia = Pitch_Circle - 2.5 * Module
Addendum = 1 * Module
Dedendum = 1.25 * Module
Tooth_thickness = pi * Module /2
/* Zm = 0.111111 * num_teeth + 0.5
/* Sm = (0.01400554 * Num_teeth +2.95213 * Zm - 1.47606) * Module
ELSE
Addendum = 1* Module + AMOUNT_ADD_MODI
Dedendum = 1.25 * Module + AMOUNT_ADD_MODI
Outer_Dia = Pitch_Circle + 2 * Module + Addendum
Root_Dia = Pitch_Circle- 2.5 * Module - Dedendum
Tooth_thickness = pi * Module /2 + AMOUNT_ADD_MODI
/* Zm = 0.111111 * num_teeth + 0.5
/* Sm = ((0.01400554 * Num_teeth +2.95213 * Zm - 1.47606) * Module)+0.06840*AMOUNT_ADD_MODI*Module
ENDIF
참고>
/* 걸치기 잇수 -> zm
/* 걸치기 이두께 -> sm
PTC 사용자가 만든 Involute Gear 템플릿 모델
7. Gear 설계
Template 모델에 사용된 매개변수 및 치수는 도면에 Table로 표시 할수 있습니다. 계산식을 사용 하여 계산 된 값을 도면의 Table에 입력 하여, 3D 모델을 변경 합니다.
스퍼 기어 잇수 가속 감속 토크 계산 공식
기어로 감속또는 가속하는 경우 토크를 계산하는 공식과 예제 T1 = 구동측 토크 T2 = 종동측 토크 Z1 = 구동측 기어 잇수 또는 PCD Z2 = 종동측 기어 잇수 또는 PCD *** 계산 공식 T2 = T1 x Z2 / Z1 *** 기어
gw3388.tistory.com
CREO는 무료로 VBA API를 제공 합니다. 엑셀과 연계가 가능 합니다, VBA를 학습 하신 분은 프로그램을 개발 하여 활용 하실수 있습니다.
How to get the dimensions of a feature by Creo Parametric VB API?
Feature 별로 치수 값을 표시 하는 방법 - Get dimensions by feature IpfcFeature.ListSubItems()를 사용 합니다 Use IpfcFeature.ListSubItems() with EpfcModelItemType.EpfcITEM_DIMENSION as the in..
tool-2020.tistory.com
DEMO 및 제품 소개 요청 ▶ 영업 담당자 이메일 주소 : hblee@idt21c.com
'Creo Reference Room > Part' 카테고리의 다른 글
| Template Model : Helical Gears (0) | 2022.08.07 |
|---|---|
| Spur Gear 라이브러리 구축 (0) | 2022.08.05 |
| 내부 Feature에서 "축" 삽입 하기 (0) | 2022.07.19 |
| 시작 파일에 무게 중심(Center of Gravity) 포함 하기 (0) | 2022.06.26 |
| Creo 파일 열기 > session 의미 (0) | 2022.06.23 |



